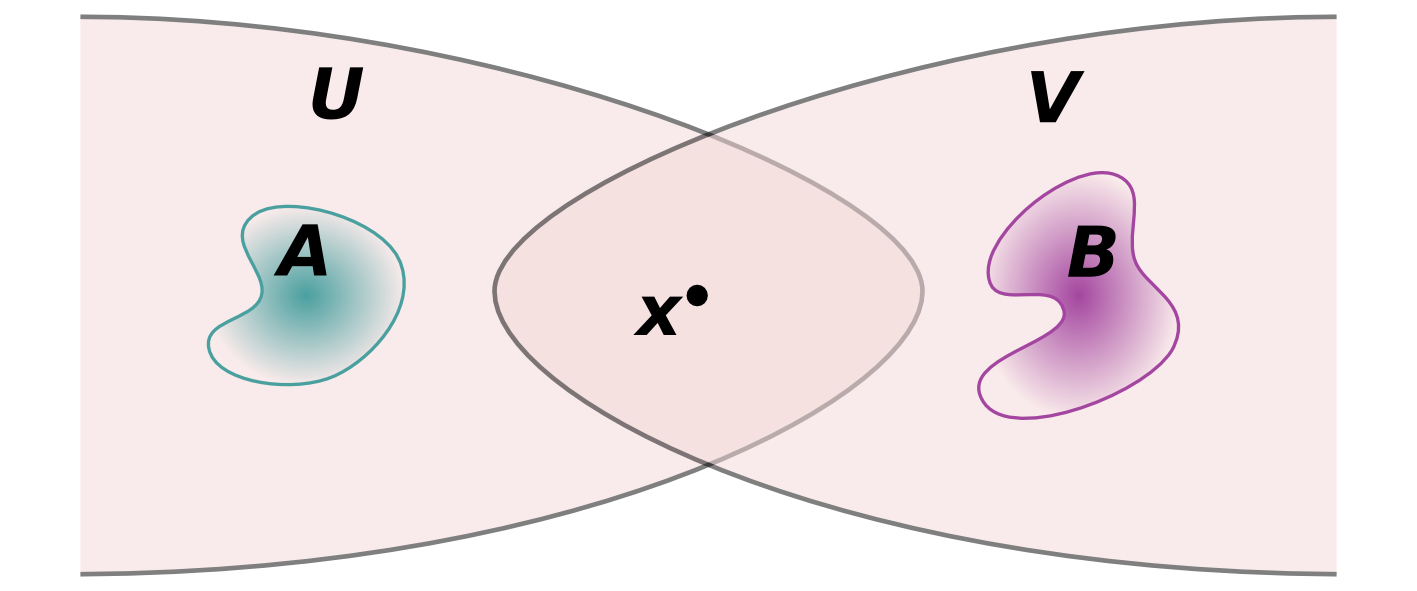
Figura 4.1: O conjunto
está “afastado” de
por não interceptar a vizinhança .
Da mesma forma,
também está “afastado”de .
Então, a união
também está “afastada” de ,
pois
é vizinhança de .
Esta seção não é formal. Nosso propósito aqui é apenas dar motivação para as definições e propriedades que serão estudadas nas seções seguintes. Se o leitor não se sentir confortável com as divagações desta seção, pode omití-la sem problemas.
Nossa motivação é obviamente o estudo que acabamos de fazer de espaços métricos. Devidamente motivados pelo estudo feito na primeira parte do livro, vamos abstrair o que seria a essência dos fenômenos de convergência e continuidade. Uma alternativa seria associar ao espaço em questão uma estrutura que identificasse, para cada um dos pontos , quais são e quais não são as sequências que convergem para . Uma deficiência desta abordagem está na dependência para com o conjunto dos números naturais, que indexam as tais sequências. Futuramente, veremos que uma solução alternativa é o uso de redes em substituição ao de sequência. Esta abordagem será feita no Capítulo ??.
Outra maneira seria associar a uma estrutura que indicasse, quais são os conjuntos que formam as “vizinhanças” de cada ponto de . A família das vizinhanças de , denotadas por , indica do que é que está “próximo” e do que é que está “afastado”. O ponto está próximo de um conjunto quando para todo , tivermos . A palavra “próximo” está entre aspas porque esse não é o termo matemático utilizado. Dizemos que está no fecho de (Definição 6.1), ou que é um ponto de aderência de .
As famílias deveriam satisfazer as propriedades listadas na Proposição 3.4. O item (1) não gera grandes polêmicas. Para que um conjunto esteja próximo do ponto, tem que interceptar todas as suas vizinhanças, portanto, acrescentar conjuntos maiores não modificaria a “convergência”. Talvez o nome “vizinhança” não seja realmente uma boa escolha, já que sugere que sejam conjuntos pequenos. Mas ao contrário disso, as vizinhanças são conjuntos que são grandes o suficiente para conter uma bola, no caso dos espaços métricos. Quando dizemos
[…] para todas as vizinhanças […],
geralmente estamos omitindo uma referência a uma expressão do tipo “por menores que sejam”. Em uma conversa, se quiséssemos enfatizar, diríamos
[…] para todas as vizinhanças, por menores que sejam […]
Esse tipo de argumento poderia ser restrito às vizinhanças “pequenas”, e é por isso que existe a noção de base de vizinhanças de um ponto (Veja a Definição 3.7 e a Proposição 3.8). Assim, o item (1) se presta mesmo a maximizar a família de modo que o fenômeno de convergência não seja alterado.
Do ponto de vista do fenômeno de convergência, o item (2) também serve ao mesmo propósito de maximizar a família . Isso porque, se para , existem tais que
então, fazendo ,
Assim, se e são vizinhanças de , levar ou não em consideração o conjunto como sendo vizinhança de não afetaria o fenômeno de convergência. O que não é convergente continua não convergente, e o que é convergente permanece convergente. Já do ponto de vista da idéia de “proximidade”, a condição do item (2) garante que se dois conjuntos e estão longe de , então a união também está longe de . Veja a Figura 4.1. Em espaços métricos, todos os pontos estão distantes uns dos outros. Assim, nenhum conjunto finito está “próximo” de , a menos que o contenha. Por outro lado, uma sequência infinita de pontos distintos de pode convergir para . No caso de espaços topológicos gerais, é possível que uma família infinita de conjuntos “afastados” de seja tal que esteja “próximo” de , mas as uniões finitas estarão sempre “afastados” de .
O item mais difícil de aceitar da Proposição 3.4, é o item (3). Como já mencionamos anteriormente (Observação 3.5), este item serve para garantir que se e para alguma vizinhança for verdade que , então não é possível acontecer que . É equivalente a dizer que os abertos que contém formam uma base de vizinhanças de . É o que garante que se conhecermos os abertos, conheceremos toda a topologia.
Uma outra interpretação para o item (3) pode ser vista através da Figura 4.2. Suponha que é um conjunto “afastado” de , e é tal que está próximo de todos os pontos de . Então, também é um conjunto “afastado” de . De fato, se toda vizinhança de intersectar , a condição do item (3) garante a existência de uma vizinhança aberta de contida em . Esta vizinhança intersecta , mas por ser um conjunto aberto, é também vizinhança dos pontos . Como estes pontos estão “próximos” de , temos que e, a fortiori, intersectam . Ou seja, toda vizinhança de intersecta e portanto, está “próximo” de . Mais adiante, veremos que a condição imposta ao conjunto é o mesmo que dizer que está no fecho (Definição 6.1) de . E a condição do item (3) equivale a dizer que a operação de fecho é idempotente. (veja o item (4) da Proposição 6.4)

Já que nossa tentativa de definir “topologia” de um modo abstrato utilizando o conceito de vizinhança passa necessariamente pela idéia de conjunto aberto, e os conjuntos abertos por si só determinam o que vem a ser uma vizinhança de (é um conjunto que contém um aberto que contém — Proposição 3.12), a opção que vamos adotar, ao menos por enquanto, é a de definir a topologia especificando quais seriam os conjuntos abertos. Para um conjunto , escolhemos de modo que tenha as propriedades listadas na Proposição 3.13. Essas propriedades são semelhantes às correspondentes para “vizinhanças”. Dizer que é o mesmo que dizer que todo ponto tem ao menos uma vizinhança (aberta).
Agora que, na medida do possível, devidamente motivados, vamos definir o que vem a ser uma topologia em um conjunto qualquer.
Definição 4.1 (Espaço Topológico).
Seja um conjunto qualquer. Dizemos que uma família define uma topologia no espaço , ou que é um espaço topológico, quando satisfaz:
Os subconjuntos tais que são chamados de abertos do espaço topológico . Por um abuso de notação, quando conveniente, dizemos que é um espaço topológico.
A topologia de um espaço métrico, definida em 3.11 é de fato, pela Proposição 3.13, uma topologia no sentido da Definição 4.1. Vejamos outros exemplos de topologia.
Exemplo 4.2 (Topologia Discreta).
Dado um conjunto qualquer , é um espaço topológico. Esta topologia é induzida, por exemplo, pela métrica discreta mencionada no Exemplo 1.9.
Exemplo 4.3 (Topologia Trivial (caótica)).
Dado um conjunto qualquer , é um espaço topológico. Se o conjunto tiver mais do que um elemento, essa topologia nunca é dada (induzida) por uma métrica, pois não satisfaz a Proposição 1.6.
Exemplo 4.4 (Topologia da Continuidade Inferior).
Considere os números reais e a seguinte família de subconjuntos de
Neste caso, é um espaço topológico. Assim como no Exemplo 4.3, essa topologia também não é induzida por uma métrica.
Do mesmo modo, existe a topologia da Continuidade Superior, dada por
Exemplo 4.5 (Topologia Inicial).
Seja um conjunto e um espaço topológico. Considere uma aplicação qualquer. Então é um espaço topológico.
Assim como fizemos para espaços métricos, podemos definir para um espaço topológico , o que é para cada ponto , a família de todas as suas vizinhanças.
Seja um espaço topológico. Dado , uma vizinhança aberta de é um aberto que contém o ponto . Uma vizinhança de é qualquer conjunto que contenha uma vizinhança aberta de . Denotamos por a família de todas as vizinhanças de .
Observação 4.7. Alguns autores usam o termo vizinhança para designar apenas as vizinhanças abertas. Provavelmente, a causa disso, é a sobrevalorização dos conjuntos abertos. Em muitos casos, onde seria melhor considerar vizinhanças, muitos matemáticos insistem em enxergar apenas os conjuntos abertos. Neste livro, se quisermos uma vizinhança aberta de , diremos “vizinhança aberta de ”, ou simplesmente, “um aberto que contém ”. Caso contrário, diremos apenas vizinhança para o que outros autores chamariam de “um conjunto que contém uma vizinhança aberta de ”.
Em um espaço topológico qualquer, as vizinhanças de um ponto possuem as mesmas propriedades para o caso de espaços métricos que as descritas na Proposição 3.4.
Seja um espaço topológico, e um ponto de . Então valem as seguintes afirmações sobre a família de todas as vizinhanças de :
Demonstração. Todos os itens são evidentes da definição de vizinhança. O item (2) é consequência do fato de ser fechado por interseção finita. □
Assim como no caso de espaços métricos, podemos caracterizar os conjuntos abertos como sendo aqueles que são vizinhanças de todos os seus pontos.
Dado um espaço topológico , um conjunto é aberto se, e somente se, for vizinhança de todos os seus pontos.
Demonstração. Pela definição de vizinhança, um conjunto aberto é evidentemente vizinhança de todos os seus pontos. Suponha então que é vizinhança de todos os seus pontos. Vamos mostrar que é aberto.
Por hipótese, para cada existe um aberto tal que . Neste caso,
Como é uma união de abertos , temos que também é aberto. □
Seja um espaço topológico e um ponto qualquer de . Uma família formada por vizinhanças de , , é chamada de base de vizinhanças de quando para toda vizinhança existir tal que . Se todos os conjuntos de forem abertos, ou seja, se , então diremos que é uma base de vizinhanças abertas de .
Agora que, mesmo sem uma métrica, definimos o que vem a ser uma vizinhança de um ponto, podemos definir convergência de sequências. As sequências não serão tão importantes para a teoria geral. No entanto, motivarão a definição de redes; um conceito que será trabalhado no Capítulo ??.
Seja um espaço topológico e uma sequência de elementos de . Dizemos que converge para na topologia , quando para toda vizinhança existir tal que
De maneira semelhante ao caso dos espaços métricos, denotamos tal fato por , ou simplesmente .
Observação 4.13. Novamente, como no caso métrico, para saber se uma sequência converge para , basta verificar a condição da Definição 4.12 para uma base de vizinhanças de . Em particular, assim como no caso dos espaços métricos, dados , teremos que se, e somente se,
para toda vizinhança aberta de existe tal que
Isso porque a família das vizinhanças abertas de formam uma base para .
A essas alturas, o leitor já sabe o que será tratado nesta seção. Assim como fizemos para os espaços métricos na Seção 3.2, vamos falar sobre a continuidade de aplicações entre espaços topológicos. O leitor deve comparar a Definição 4.14 e a Proposição 3.6, que caracteriza continuidade em um ponto em espaços métricos.
Sejam e espaços topológicos e uma aplicação qualquer entre e . Para , dizemos que é contínua em quando
Ou seja, quando a imagem inversa de toda vizinhança de for uma vizinhança de .
Em uma formulação mais semelhante aos argumentos do estilo , a definição de continuidade fica assim:
Para todo existe tal que
Como no caso de espaços métricos, basta verificar a condição da definição para uma base de vizinhanças de .
Sejam e espaços topológicos e uma aplicação qualquer. Dados e uma base de vizinhanças de . Então, é contínua em se, e somente se,
Demonstração. Se , então existe tal que . Portanto, . Assim, . Como é um elemento arbitrário de , temos que
Continuidade é um conceito central em topologia. Uma aplicação contínua transporta aspectos topológicos entre os espaços em questão. Dada uma aplicação entre os conjuntos e , podemos ver como uma aplicação
Se e são espaços topológicos e é contínua em , podemos olhar para restrita a como sendo uma aplicação
A proposição a seguir demonstra que quando é contínua em todo ponto de , então a restrição de a pode ser vista como uma aplicação
Sejam e espaços topológicos e uma aplicação de em . Neste caso, são equivalentes:
Demonstração. Para todo ponto , . Então, dado , temos que para todo ponto , como é aberto, . Pela continuidade de no ponto , temos que . Acabamos de mostrar que é vizinhança de todos os seus pontos, e portanto, pela Proposição 4.9, é um aberto de .
Por outro lado, para qualquer, denotando por a família dos abertos que contém , como a imagem inversa desses abertos contém , temos que
E como é uma base de , temos que
Ou seja, é contínua em . □
Definição 4.17 (Função Contínua). Dizemos que uma função entre os espaços topológicos e é contínua quando é contínua em todo ponto . Ou, equivalentemente, quando .
Para dois conjuntos e , uma bijeção identifica cada ponto de a um único ponto de e vice-versa. Se e forem espaços topológicos, for contínua e sua inversa também for contínua, então também serão identificados cada aberto de com um único aberto de e vice-versa. Tudo o que puder ser dito sobre a topologia de poderá ser afirmado sobre a topologia de através da identificação dada por .
Sejam e espaços topológicos. Dizemos que uma aplicação
é um homeomorfismo de em quando for bijetiva, contínua e sua inversa também for contínua.
Quando existe um homeomorfismo entre dois espaços topológicos, dizemos que estes espaços são homeomorfos.
Com uma aplicação entre espaços topológicos, podemos tentar relacionar as topologias de e . Se for um homeomorfismo, sabemos que e possuem exatamente a mesma topologia quando os pontos de são identificados com os de através de . Se for uma bijeção contínua, podemos identificar cada elemento de com um único elemento de . Com esta identificação, teremos que . Uma outra propriedade que pode ter, que ajudaria a relacionar os espaços e é a de levar abertos de em abertos de . Neste caso, dizemos que é uma aplicação aberta.
Seja uma aplicação entre os espaços topológicos e . Dizemos que é uma aplicação aberta quando .
Um homeomorfismo é uma bijeção contínua e aberta. Nossa motivação para a definição de aplicação aberta é simplesmente imaginar, ignorando o fato de que pode nem mesmo ser bijetiva, o que seria necessário para que seja contínua. Mais adiante, veremos maneiras de se transportar topologias de um espaço topológico a um conjunto qualquer através de aplicações entre eles. Quando temos uma bijeção entre um espaço topológico e um conjunto qualquer, fica fácil transportar a topologia de um para o outro. Imagine que , não uma bijeção, mas uma sobrejeção do espaço topológico no espaço topológico . Podemos definir o conjunto
que nada mais é do que “agrupar” todos os elementos de que têm a mesma imagem. A projeção natural de em é dada por
A projeção leva um elemento na “classe” formada por todos os elementos de que tem, por , a mesma imagem que . A aplicação pode ser fatorada, de modo que o seguinte diagrama é comutativo (ou seja, ):
Basta definir . Agora, é uma bijeção. Faz sentido esperar que a topologia de possa ser transportada para , de modo que as propriedades topológicas de possam ser investigadas em função de e vice-versa. Em particular, se for contínua e aberta, podemos esperar que seja um homeomorfismo entre e (Veja o exercício ??). Trataremos desse tipo de topologia, a topologia quociente, no Capítulo 7.
Assim como podemos falar de continuidade em um ponto, podemos também definir o que seria dizer que é aberta em . Assim como no caso de continuidade, a definição fica melhor se usarmos vizinhanças de ao invés de abertos.
Seja uma aplicação entre os espaços topológicos e . Dizemos que é uma aplicação aberta em quando .
![]()